

P
rávě takové zadání obdrželi kon-
struktéři oddělení automatizace
společnosti Metaldyne Oslavany,
spol. s r. o. – vyrobit pro potřeby
vlastního podniku stanici, která by nároč-
ný úkol zvládla.
Co je vlastně třeba kontrolovat?
Testované excentrické hřídele mají
různé délky, průměry, některé jsou bez
závitu, jiné se závitem. U všech je nutno
kontrolovat přítomnost trhlin na povrchu,
„naraženiny“ na hranách excentru nebo
na závitu, průměry, házivost, vyosení
excentru, šířku excentru, průměry závitu,
tepelné zpracování, popis na čele hřídele
a šířku dvou ploch.
Návrh kontrolní stanice
Vzhledem k tomu, že každá hřídel je
víceméně jiná, museli vývojáři řešit
různé najetí upínacích trnů, různé úhly
kamer, různé vzdálenosti sond od hřídelí.
Univerzálnost stanice podtrhuje to, že je
jednoduše přestavitelná pro testování
dvaceti devíti různých typů excentrických
hřídelí.
Výsledné řešení bylo rozvrženo do deseti
dílčích stanovišť.
Pro hlavní pohony zvolili konstruktéři
osvědčené prvky společnosti Festo –
elektrické osy EGSL (15 x), DNCE (2 x)
a motory EMMS (21 x).
Všech jedenáct motorových ovladačů
– dvojitý CMMD (10 x) a CMMS (1 x) –
komunikuje s hlavním řízením po sběrnici
PROFIBUS, což výrazně zkrátilo čas mon-
táže a snížilo cenu za kabelové rozvody.
Prostřednictvím sběrnice PROFIBUS
komunikují s hlavním PLC i sedmnácti-
palcová dotyková obrazovka, ventilový
terminál MPA-FB-VI, řízení měřicích sond
a dva roboty Fanuc M10iA.
Kontrolu zajišťuje vysokorychlostní
pětimegapixelová kamera KEYENCE.
Komunikace s kamerami probíhá po
sběrnici Ethernet, což výrazně zrychlilo
přenos naměřených hodnot v porovnání
s klasickou komunikací I/O. Tento způsob
komunikace je zatím ojedinělý a v Evropě
byl použit vůbec poprvé.
Jak vše funguje?
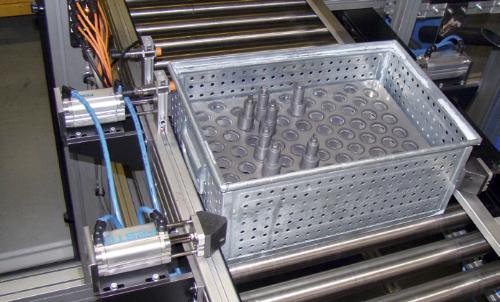
Obsluha stroje umístí speciální zásobník
s hřídelemi na válečkový vstupní doprav-
ník. Zásobník dojede na zarážky. Robot
umístěný nad zásobníkem již v téhle chvíli
ví, který typ výrobku bude kontrolován.
Nejdříve vezme kameru, kterou uchopí
pomocí výměnné hlavy, a následně nasní-
má polohu hřídelí v zásobníku. Kameru
odloží, uchopí chapadlo a s ním se pře-
sune pro hřídel, kterou vyjme ze zásob-
níku a přemístí ji do mezipolohy (ofuku
stlačeným vzduchem), kde je zbavena
případných hrubých nečistot. V dalším
kroku robot položí hřídel na vstupní pozici
kontrolní stanice na vozíček. Pro zajištění
správné pozice (excentrem směrem dolů)
je kromě její polohy snímána orientace.
Krok za krokem
Stanoviště 1: Vstup – chapadlo vezme
hřídel ze vstupního zásobníku a položí ji
na transfer, který ji přesune dále.
Stanoviště 2: Vířivé proudy – zde probíhá
kontrola trhlin pomocí zkoušky vířivými
proudy. Hřídel upnutá mezi hroty se
Obsluha stroje umístí speciální zásobník
s hřídelemi na válečkový vstupní dopravník,
který dojede na zarážky. Ze zásobníku jsou hřídele vyjímány robotem.
Testovaná hřídel umístěná na transferu
na pozici č. 1, kam ji
přesune chapadlo ze vstupního zásobníku.
Robot umístěný nad zásobníkem
je vybaven výměnnou hlavou.
Ovládání probíhá pomocí ventilového terminálu.
2. 2011
trends in automation
Synergie
38
–
39