thevacuumgripper canonly just
distinguishbetweenapart and thebelt.
Reliableproduction therefore requiresa
handlingsystemwhichprovideshighly
preciseand consistentmotion
sequences that don’t affect theposition
of thepartson thebelt but enable them
tobegripped reliably. “This iswhyusing
the right robot technology is crucial,”
explainsRolfWirz,ManagingDirector
of Amax.
Robotwithdeltakinematics
“Itwas clear that onlya robotwithdelta
kinematics couldachieve thenecessary
flexibilityandspeed required topickup
thesmall parts in theworkingarea,”Wirz
continues. “Wehavehadour eyeson the
Festodelta robot EXPT for a long timebut
didn’t haveasuitableproject until now.
Thedeciding factorwas theoptimum cost
benefit ratioand the fact thatwehave
alreadybeenworking together
successfullywith FestoSwitzerland for
manyyears,”explainsautomationexpert
Wirz.
“Festowasasked todevelop thevacuum
gripper systemon thebasisof its
experience inpneumaticautomation,”
saysWirz. This requiredagreat deal of
knowhow, since it isnot easy togenerate
the right amount of vacuumat the right
time for thegrippingandejector pulses.
“Itwasadvantageous that Festo could
providebothpneumaticandelectric
automation technology, and thatwewere
able touse thegripper systemand the
robot to createadiscretedevelopment
package. Thisalso resulted ina reduction
in thenumber of interfacesand the
associated cost,”saysWirz, describing
thebenefitsofworkingwith Festo.
Fine tuning in theFesto
ApplicationCentre
However, before the tripod couldbeput
towork in thepalletiser, a largenumber
of validation testswere required. “We
thereforeaskedour colleagues in the
ApplicationCentreat headquarters in
Germany for support,”saysDanielMinger,
SalesEngineer, IndustryCluster Small
PartsHandlingandElectronicswith Festo
Switzerland. Inorder toachieve120cycles
perminute, twodelta robotswouldbe
necessary: thefirst onewouldpickupas
manyparts from the conveyor belt as
possible,while thesecondonewould
pickup the rest. A Festovisionsystem
withan integratedPLCwouldcontrol both
tripods. At least thiswas the theory.
But inpractice thesituationwasdifferent:
with complexapplications, screen
Hard todistinguish
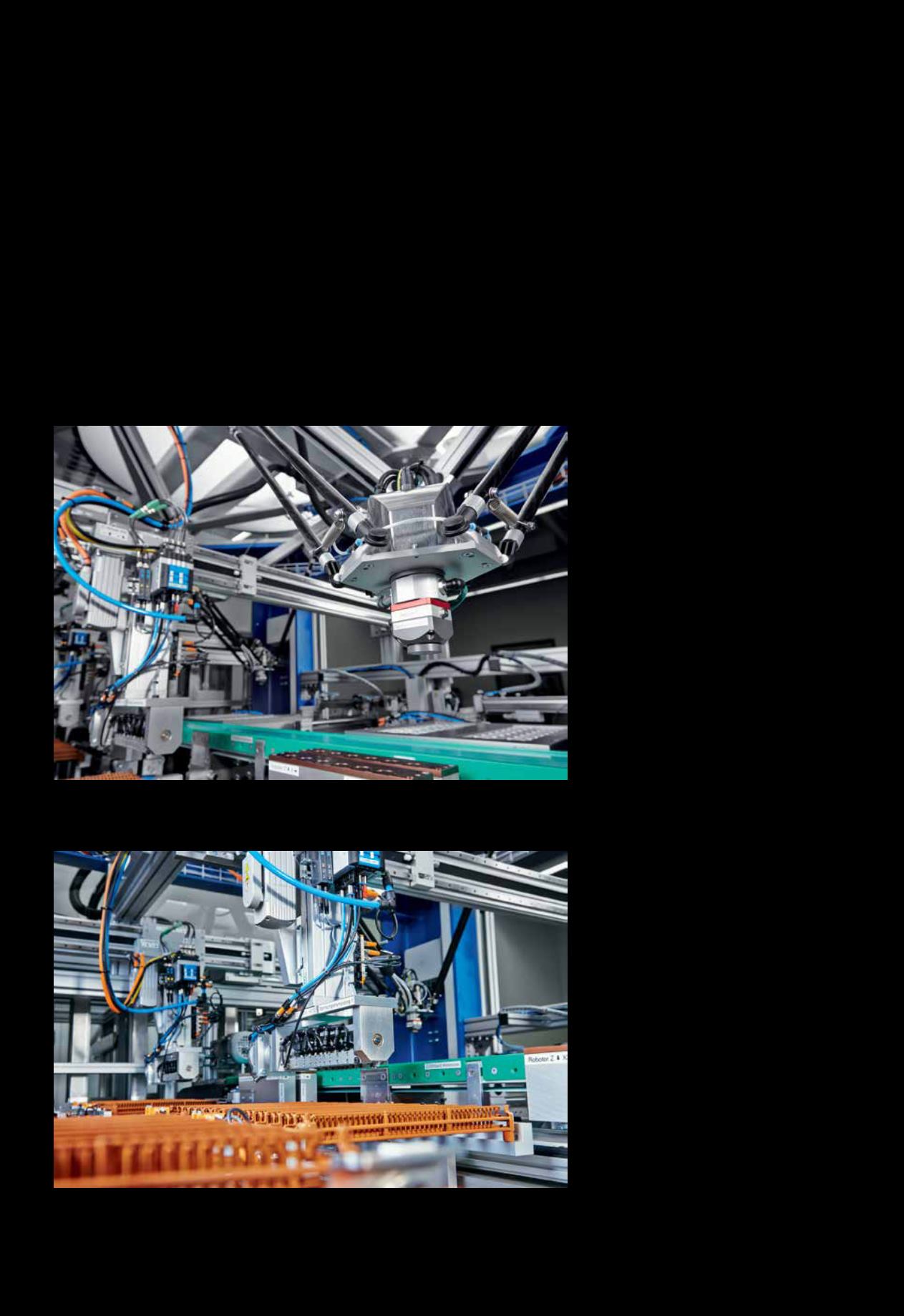
Theactual processof palletising then
begins.The intelligent visionsystem
SBO..-Qdetects thepositionof thewatch
partson the conveyor belt andsignals
this to twodelta robotsEXPT. Thedelta
robot usesaspeciallydevelopedvacuum
gripper topickup theparts from the
conveyor belt and toset thesedown,
dependingon theapplication, ineithera
lattice trayor JEDEC tray. Thisprocess is
not quiteassimpleas it sounds. As the
small partsareso light, adraught of air
caneasily change their positionon the
belt.What ismore, theyareso thin that
Thedelta robot usesaspeciallydevelopedvacuumgripper
topickup theparts
from the conveyor belt andset thesedown ineither a lattice trayor JEDEC tray.
TheelectricaxisEGC-HD,
known for its rigidityandprecision,movesa
mechanical gripper horizontally. This liftsseveral partsat a time, swivels
90° andsets themdown ina lattice tray.


