

































Show more
Show less
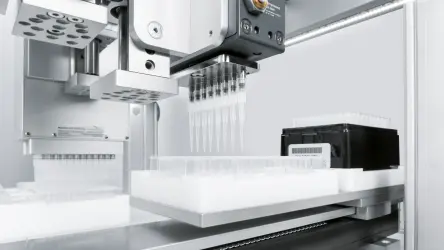
Insights from our experts in gas handling, liquid handling as well as motion control to give you impetus to improve your medical devices or laboratory automation. Although the objectives in the various sectors may be different, the demand for innovation and faster development is highly significant for companies in the whole field. Prepare to be inspired by our technologies for life science!