
Festo Positioning CNC Robotics (FPosCR)
Please sign in to see prices or request test licenses
Festo Motion & Robotics PLC Library FPosCR makes it easier in every respect to create general Motion, CNC and Robotics applications.
Download: FPosCR library
FPosCR is the ideal tool for quickly and reliably generating the desired solution for applications with motion scopes of various types. Equipped with a wide range of functions and methods – for simple to advanced solutions as well and for a wide range of fields of application. Simply integrate it into your own Codesys code and put it into operation via the convenient, clearly structured web visualization.
This Festo application library is based on the Codesys SoftMotion Library V4.12.0.0+ resp. the PLCopen Motion Control Specification Part 4.
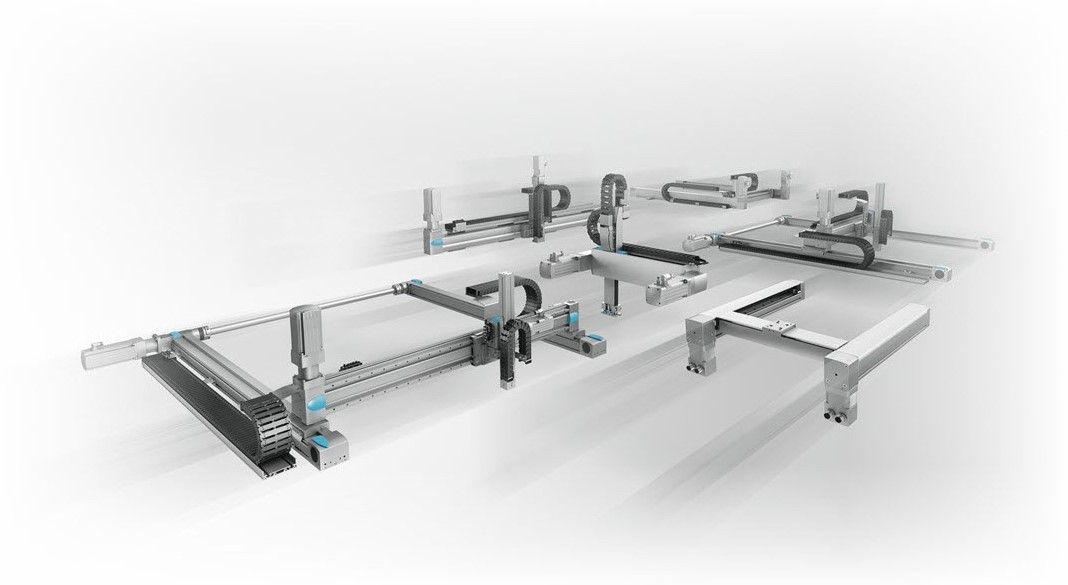
For a wide range of Festo Cartesian Robots:
• Single-axis gantry: YXCS
• Two-axis gantry: EXCT, YXCL, YXML
• Three-axis gantry: YXCR, YXMR
• 3d cantilever axis YXCA
• Gantry robot: EXCH, EXCM, YXCF, YXMF
Matched to the Control and Drive Platforms:
Control/PLC: CPX-E-CEC-M1-xx and CECC-X-M1-xx
Drive: CMMT-AS, CMMT-ST and EMCX (integrated)
Scope of Functions and Methods:
• System configuration
• Power management
• Homing (single axis, complete gantry system)
• Jogging, stepping, point-to-point moves
• CNC programs (from text file, intermediate code or direct input for interpolator)
• Robotics programs (linear move, point-to-point, circular move, path-based motion)

