

Presetting of travel time
Please sign in to see prices or request test licenses
With the Motion App „Presetting of travel time“, you only enter the required advancing and retracting time of the drive. The Festo Motion Terminal then carries out a teach-in run to adapt automatically to the given parameters. Permanent monitoring guarantees constant cycle times and compensates for disturbances like friction, changes to supply/dynamic pressure and even slow changes in load. Cycle times can be easily changed – by remote control, they are tamper-proof and don't need to be mechanically adjusted. In addition, you can teach in and save parameter sets for different formats.
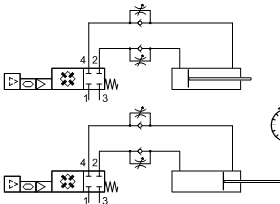
The basic function for the Motion App is the highly precise exhaust-air-throttled run – manually setting the flow control valve is no longer necessary. You simply specify the setpoint travel times for advancing and retracting with the Festo Motion Terminal VTEM. Using the sensor data, the end-position switch independently determines the real travel time and adapts the exhaust air flow control until the preset travel time is reached. The supply air flow control is always fully open. The actual travel time is defined by the run command until the end-position switch is reached. An adaptation algorithm makes sure that set travel times are always adhered to thanks to permanent monitoring and adjustment. If, after the run, the adaptation algorithm determines that the set time was not adhered to, the flow control will be adjusted. There is no end-position cushioning. This needs to be taken care of by the customer. The end-position switches of the drive send the signals to the digital input modules of the VTEM only.
You need a digital input module CTMM on the Festo Motion Terminal as well as two digital end-position sensors on the drive.
- Specifications in the Motion App and via the PLC:
- Advancing time
- Retracting time
- Feedback to the controller:
- Measured travel time
- Reaching the end position
- Teach-in run:
Commissioning is carried out manually or with the help of the teach-in run. The teach-in run executes as many strokes as are needed until the required actual travel time is within the tolerance range. You can start the teach-in run in WebConfig or via the transfer channel. When the tolerance range is reached, the movement will stop in the retracted state. The teach-in run is started by the user via the teach-in run app #60.
- Continuous saving of „taught-in values“:
The „taught-in values“ will be saved permanently when the system is switched off. This way, you do not have to go through another teach-in process the next time you switch it on. The application parameters need to be saved separately.
If peripheral parameters have changed since switch-off, it could be that the first movement has the wrong values. This can lead to unexpected behavior.
Important: The following must be considered after longer idle times! When switching on again, the application and system parameters need to be inspected for changes. If there are changes, the VTEM will reset the „taught-in values“ back to the default.
- Pre-pressurization function:
If, when starting the Motion App, the pressure in the cylinder chambers is more than 20% below the supply pressure, both chambers will be pressurized in a controlled way before starting the requested movement. This prevents the piston retracting into a completely pre-exhausted end position.
- Validity:
- Accuracy: ± 2%, but no more precise than ± 20 ms
- Maximum permissible number of teach-in strokes: 10
- The accuracy or the number of teach-in runs apply to:
- Cylinder diameter ≥ 25 and ≤63,
- at speeds ≥ 0.15 m/s,
- tube lengths ≤5 x cylinder stroke
- cylinder stroke ≥ 50 mm and ≤500 mm
- mass [kg] ≤0.004 x supply pressure [bar rel] x ( cylinder diameter [mm²] )
e.g. supply pressure 6 bar, cylinder diameter 25 mm ==> maximum permitted mass = 15 kg
- The app can also be operated outside of these limits; however, the accuracy and number of required teach-in runs may be restricted.
- The minimum travel time possible depends on the cylinder and the tubing connections.
- Notes:
- Please note the max. impact energy of the cylinder. You need to make sure that this is not exceeded, for example by using additional dampeners.
- To change the travel time via remote control or to change the parameter set, you need to briefly deactivate the motion task and then reactivate it.
- A reduced supply pressure can, if necessary, increase the accuracy.
- Pauses which deviate from the normal cycle result in deviations in the travel time.
- If a cylinder is used which is not available in the database (unknown), this can lead to a higher number of teach-in cycles.