

Preajuste del tiempo en movimiento
Por favor, regístrese o ingrese como cliente para ver precios o solicitar una versión de prueba
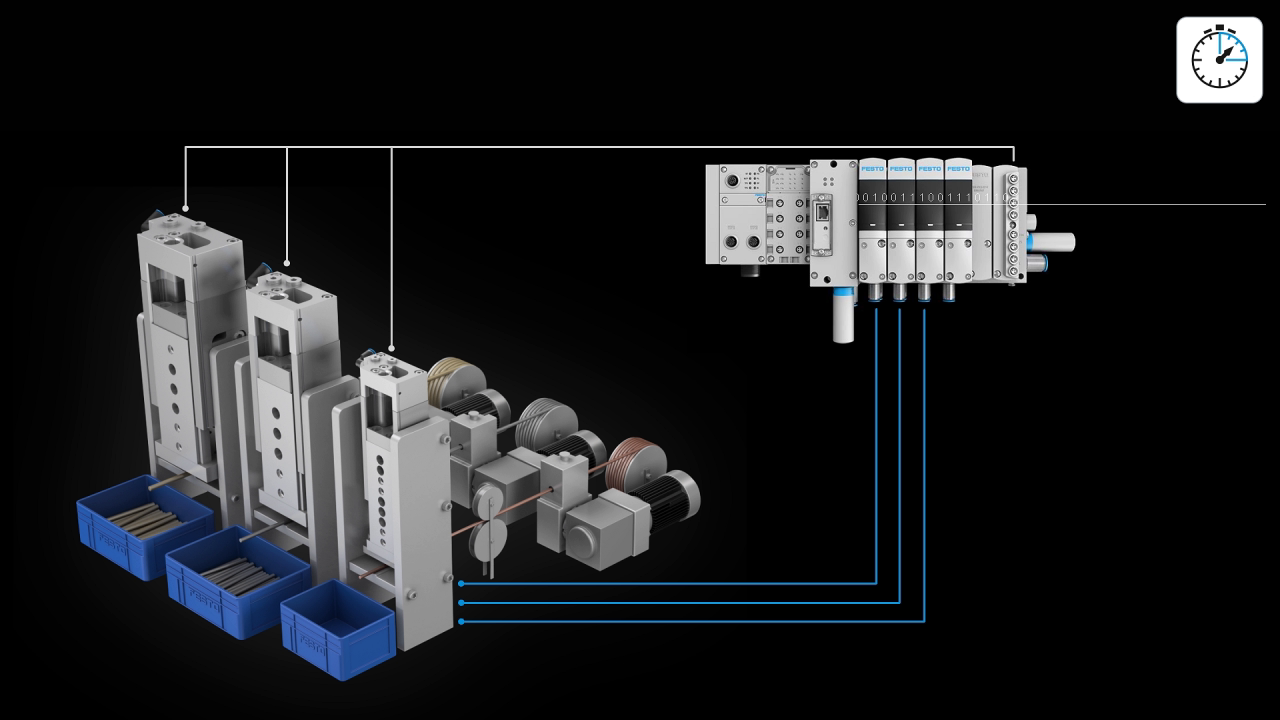
Con la Motion App „Preajuste del tiempo en movimiento“ puede indicar únicamente el tiempo de retroceso y de avance deseado de su accionamiento. El Festo Motion Terminal se adapta posteriormente de forma automática a las condiciones preestablecidas mediante un recorrido de programación. La monitorización permanente garantiza duraciones de ciclo invariables y compensa magnitudes pertubadoras tales como el rozamiento, la modificación de la alimentación / presión dinámica e incluso la modificación lenta de masas. Es posible cambiar las duraciones de ciclo de forma sencilla – por control remoto, con una manipulación segura y sin necesidad de realizar ajustes mecánicos. Además, puede programar y guardar grupos de parámetros para diferentes formatos.
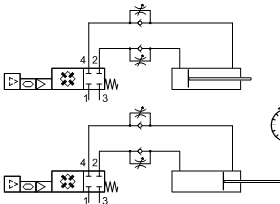
La función básica para la Motion App es el trayecto con estrangulación del escape de alta precisión – deja de ser necesario el ajuste manual de la válvula reguladora de caudal. Simplemente marque los tiempos de desplazamiento nominales para el avance y el retroceso mediante el Festo Motion Terminal VTEM. Mediante los datos del sensor, el sensor de final de carrera determina el tiempo de desplazamiento real de manera autónoma y ajusta la estrangulación de escape hasta alcanzar el tiempo de desplazamiento preestablecido. La estrangulación de la alimentación. está siempre abierta al 100 %. El tiempo de desplazamiento real se define desde la orden de desplazamiento hasta alcanzar el sensor de final de carrera. Un algoritmo de adaptación garantiza que se cumpla siempre el tiempo de desplazamiento preestablecido por medio de la monitorización y adaptación permanentes. Si, tras el recorrido, el algoritmo de adaptación detecta que no se ha cumplido el tiempo preestablecido, se adapta la estrangulación. No existe una amortiguación de fin de carrera. Esta debe garantizarla el cliente. Los sensores de final de carrera del accionamiento envían sus señales únicamente a los módulos de entrada digitales del VTEM.
Necesita un módulo de entrada digital CTMM en el Festo Motion Terminal y dos sensores de final de carrera digitales en el accionamiento.
- Especificaciones en la Motion App y mediante el control PLC:
- Tiempo de avance
- Tiempo de retroceso
- Devolución al control:
- Tiempo de desplazamiento medido
- alcanzar la posición final
- Recorrido de programación:
La puesta en funcionamiento se realiza manualmente o con ayuda del recorrido de programación. El recorrido de programación ejecuta carreras hasta que el tiempo de desplazamiento real deseado se sitúe en el margen de tolerancia. Puede iniciar el recorrido de programación en WebConfig o por medio del canal de transferencia. Una vez se alcanza el margen de tolerancia, el movimiento se detiene en estado extraído. El usuario inicia el recorrido de programación mediante la Lernfahrt-App #60.
- Guardado continuo de „valores aprendidos“:
Al apagar, los „valores aprendidos“ se guardan permanentemente. De esta manera, no tiene que iniciar un proceso de programación nuevo la próxima vez que encienda el equipo. Los parámetros de aplicación deben guardarse por separado.
Si se han cambiado parámetros en los periféricos una vez apagados, es posible que el primer movimiento se realice con valores erróneos. Esto puede provocar un comportamiento imprevisible.
Importante: Debe tener esto en cuenta sin falta en caso de un tiempo de paro elevado. Durante el encendido, se comprueba si los parámetros de aplicación y de sistema han sufrido modificaciones. En caso de haber modificaciones, VTEM restablece los „valores aprendidos“ a los ajustes por defecto.
- Función de presurización previa:
Si, al iniciar la Motion App, la presión en las cámaras del cilindro es inferior a la presión de alimentación en más de un 20 %, ambas cámaras se presurizan controladamente antes del inicio de un movimiento. Así se evita que el émbolo avance a una posición final completamente predescargado.
- Ámbito de validez:
- Precisión: ± 2 %, pero en ningún caso más preciso que ±20 ms
- Número máximo admisible de carreras de programación: 10
- Los datos de precisión o los recorridos de programación se aplican para:
- Diámetros del cilindro ≥25 y ≤63,
- con velocidades ≥0,15 m/s,
- longitudes de tubo flexible ≤5 x carrera del cilindro
- Carrera del cilindro ≥50 mm y ≤500 mm
- Masa [kg] ≤0,004 x presión de alimentación [bar rel. x (diámetro del cilindro [mm²] )
P. ej. presión de alimentación 6 bar, diámetro del cilindro 25 mm ==> masa máxima admisible = 15 kg
- Por fuera de estos límites, el funcionamiento de la aplicación también es posible; no obstante, es posible que la exactitud o el número de recorridos de programación presente limitaciones.
- El mínimo tiempo de desplazamiento posible depende del cilindro accionado y de la tubería.
- Notas:
- Observe la energía máx. de impacto del cilindro. Debe asegurar que esta no se sobrepase, p. ej. con amortiguadores adicionales.
- Para poder modificar por control remoto el tiempo de desplazamiento o los registros de parámetros, debe desactivar momentáneamente la tarea con movimiento y reactivarla a continuación.
- Una presión de alimentación reducida puede aumentar, en su caso, la precisión.
- Variaciones respecto al ciclo habitual: los tiempos de pausa provocan variaciones en el tiempo de recorrido.
- Si se utiliza un cilindro no incluido en el banco de datos (unknown), esto puede provocar un aumento en el número de ciclos de programación.