
Festo Positioning CNC Robotics (FPosCR)
Bitte melden Sie sich an, um Preise zu sehen oder Testlizenzen anzufordern
Die Festo Motion & Robotics SPS-Bibliothek FPosCR erleichtert die Erstellung von allgemeinen Motion-, CNC- und Robotik-Anwendungen in jeder Hinsicht.
Herunterladen: FPosCR library
Beschreibung
FPosCR ist das ideale Werkzeug, um schnell und zuverlässig die gewünschte Lösung für Motion-Anwendungen verschiedenster Art zu erstellen. Ausgestattet mit einer Vielzahl von Funktionen und Methoden – sowohl für einfache als auch für anspruchsvolle Lösungen und für eine Vielzahl von Anwendungsgebieten. Einfach in den eigenen Codesys-Code integrieren und über die komfortable, übersichtliche Web-Visualisierung in Betrieb nehmen.
Diese Festo Applikationsbibliothek basiert auf der Codesys SoftMotion Library V4.12.0.0+ bzw. der PLCopen Motion Control Spezifikation Teil 4.
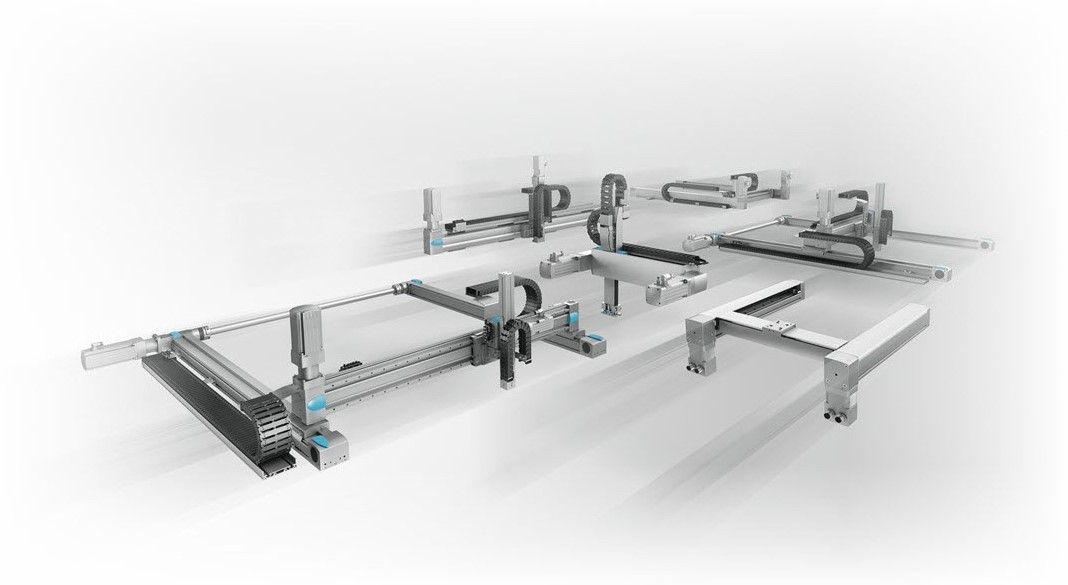
Für eine breite Palette von kartesischen Handlings bzw. Robotern von Festo
- Einachsig-Portalroboter: YXCS
- Zwei-Achs-Portalroboter (Flächenportal): EXCT, YXCL, YXML
- Dreiachsiges Portalroboter (Raumportal): YXCR, YXMR
- 3d-Auslegerachse: YXCA
- Portalroboter: EXCH, EXCM, YXCF, YXMF
Abgestimmt auf die Steuerungs- und Antriebsplattformen
Steuerung/SPS: CPX-E-CEC-M1-xx und CECC-X-M1-xx
Antrieb: CMMT-AS, CMMT-ST und EMCX (integriert)
Umfang der Funktionen und Methoden
- Systemkonfiguration
- Energiemanagement
- Referenzfahrt (Einzelachse, komplettes Portalsystem)
- Tippen, Schrittbetrieb, Punkt-zu-Punkt-Bewegungen
- CNC-Programme (aus Textdatei, Zwischencode oder direkte Eingabe für Interpolator)
- Roboterprogramme (lineare Bewegung, Punkt-zu-Punkt, Kreisbewegung, bahnbasierte Bewegung)
