














 7 / 8
7 / 8

7
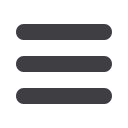
04 :
PowerGripper 2012 :
technique
inspirée de la cinématique du bec d'un
oiseau
03 :
NanoForceGripper 2012 :
technique
inspirée de la patte du gecko
07 :
MultiChoiceGripper 2014 :
différentes techniques de préhension
d'objets de tailles variables
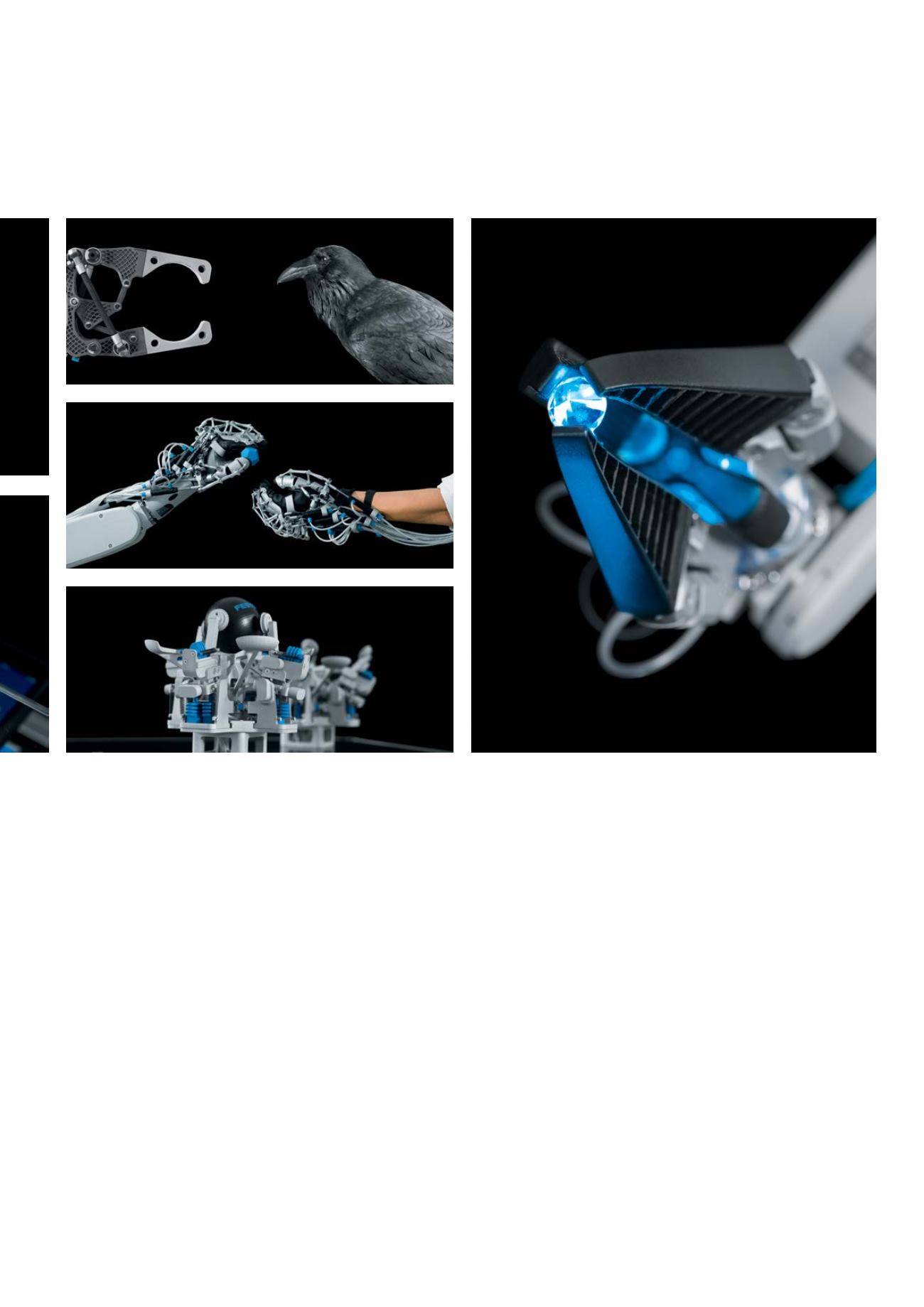
01 :
FlexShapeGripper 2015 :
technique
inspirée de la langue du caméléon
05 :
ExoHand 2012 :
amélioration du
fonctionnement pour une coopération
homme-machine
02 :
BionicTripod avec FinGripper 2009 :
technique inspirée du fonctionnement de
la nageoire d'un poisson
06 :
LearningGripper 2013 :
pré-
hension et orientation de l’objet par
auto-apprentissage
La plus large gamme de préhenseurs inspirés de la biologie
Le FlexShapeGripper vient rejoindre les préhenseurs nés du fruit de
la collaboration interdisciplinaire du programme Bionic Learning
Network.
Les développeurs ont commencé à s'inspirer du monde animal en
2009, pour créer les doigts de préhension adaptables du BionicTripod.
La structure Fin Ray Effect
®
, similaire à la nageoire d'un poisson,
résiste aux pressions latérales en s'incurvant au niveau du point de
pression, permettant ainsi aux doigts de se refermer doucement sur
les objets à saisir et donc de soulever en toute sécurité des éléments
fragiles ou de forme irrégulière. Festo cherche actuellement à produire
les doigts préhenseurs en série, sous le nom de DHAS.
Autre exemple de projet de préhenseur issu du programme Bionic
Learning Network : le NanoForceGripper de 2012, dont la zone de
préhension rappelle la patte du gecko. Il est essentiellement conçu pour
saisir des objets fragiles à la surface lisse sans laisser de traces, et ce avec
une consommation énergétique quasi nulle.
Pour le PowerGripper, les ingénieurs se sont inspirés de la cinématique
complexe du bec d'un oiseau.
L'ExoHand est un exosquelette qui s'enfile comme un gant.
Ce dispositif vous permet d'augmenter la puissance de vos doigts lorsque
vous les faites bouger et d'identifier les mouvements de la main afin de les
transférer en temps réel à la main robotisée. Le retour d'effort permet au
porteur du gant exosquelette de sentir que le robot a saisi l'objet.
En 2013, Festo s'est appuyé sur le LearningGripper pour concevoir une
plateforme de recherche capable d'apprendre et de reproduire seule des
actions complexes. Un an plus tard, c'est le pouce opposable de la main
humaine qui servait d'inspiration auMultiChoiceGripper : à l'instar de son
modèle naturel, le préhenseur était capable de modifier la position de ses
doigts afin de saisir en parallèle ou de manière concentrique, et ce sans
procéder à une quelconque conversion.
Exposition de tous les préhenseurs dans unmême lieu
Les ingénieurs sont aujourd'hui passés à l'étape suivante avec le
FlexShapeGripper : le préhenseur est en effet désormais capable de
saisir plusieurs objets de formes différentes, puis de les reposer ailleurs
en une seule opération. Le préhenseur, ainsi que ses prédécesseurs, font
aujourd'hui l'objet d'une exposition organisée par Festo qui met en avant
tous les préhenseurs issus du programme Bionic Learning Network.
02
03
04
05
06
07