
















 24 / 48
24 / 48

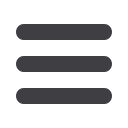
(A)
(A) Movement via muscle power
– fluidic muscles
and 30 motion axes give the robot actor great dyna-
mism and range of movement.
(B) Lightweight top performer,
perfect for human-
oid motion sequences – the latest piezo valve
technology is particularly small, offers extremely
fast switching times, is powerful and very precise.
(C) Nimble fingers:
the new, small fluidic muscles
DMSP-5 produce the movement of the fingers.
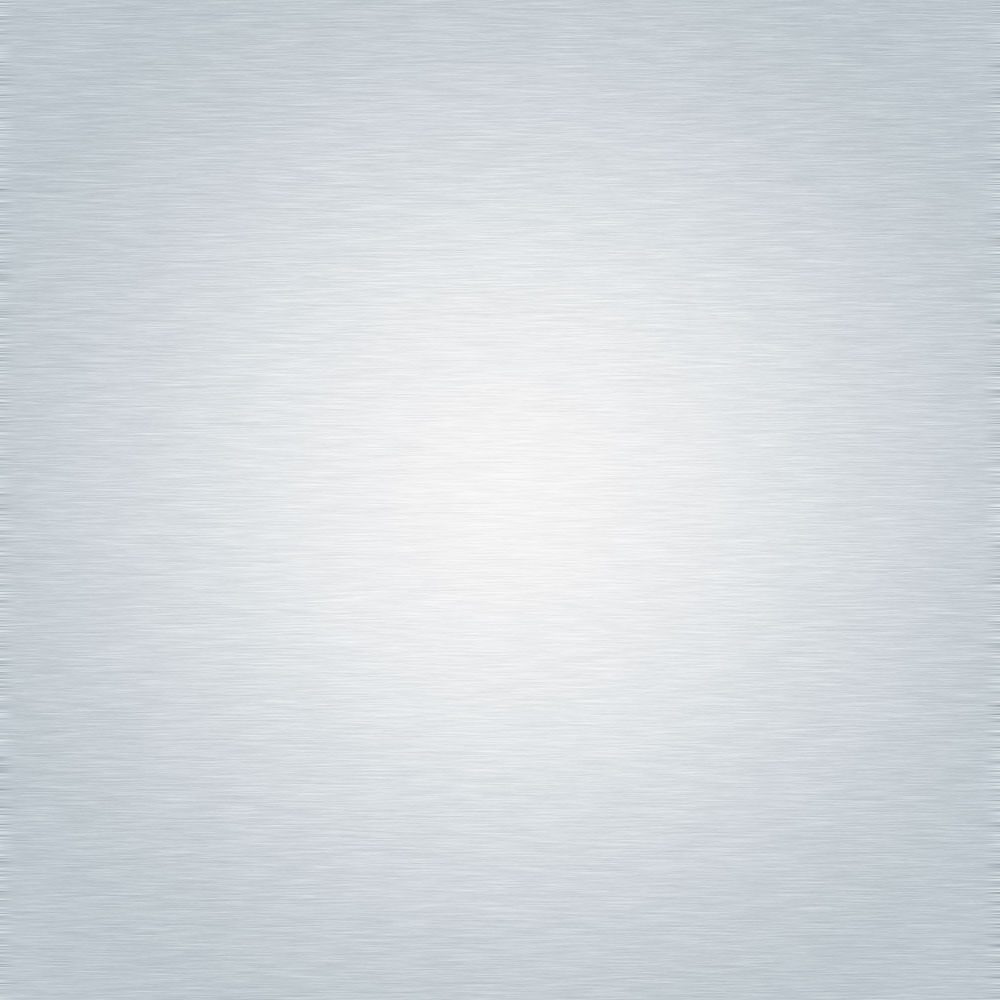
individually to visitors. In this mode,
the tablet shows the camera view of the
robot, so he can be made to look at and
address a particular person.
Natural movement through
artificial muscles
For the most part, his humanoid move-
ments are generated by pneumatic mus-
cles, or fluidic muscles. These contract
and relax like real muscles. The arms and
hands are each moved by a total of two
and eight fluidic muscles respectively,
in the sizes DMSP-10 and DMSP-20. The
finger movements are executed by the
new, small DMSP-5. The fluidic muscle is
a membrane contraction system, a flexible
hose with multifilament yarns as rein-
forcement that are integrated in a rhom-
boidal structure.
Precise control using piezo technology
The artificial muscles are actuated by,
among others, piezo valves VEAB from
Festo. Piezo valves are often a better
alternative to conventional solenoid valves,
especially in the areas of flow and pres-
sure control and as directly controlled
proportional valves, as evidenced in the
RoboThespian: they are small, lightweight,
extremely precise, very durable, incred-
ibly fast and require up to 50% less energy.
Furthermore, they hardly generate any heat
“We use the fluidic
muscle from Festo
because it makes
RoboThespian’s
movements appear
very natural.”
Will Jackson, Director of Engineered Arts and
inventor of the RoboThespian
Photo: © Engineered Arts Ltd.