

Ajuste do tempo de trajeto
Please sign in to see prices or request test licenses
No Motion App „Ajuste do tempo de trajeto“, você só especifica o tempo de entrada e de saída desejado ou o tempo de entrada do seu atuador. O Festo Motion Terminal se adapta a isto na forma de autoajuste através de uma condução de aprendizagem para as condições-limite especificadas. O monitoramento permanente garante tempos de ciclos estáveis e compensa perturbações como fricção, alterações de alimentação/pressão dinâmica e até mesmo alterações de massa furtivas. As trocas de ciclo são simplesmente possíveis – por controle remoto, protegidas contra manipulação e sem esforço de ajuste mecânico. Além disso, você pode aprender e armazenar os conjuntos de parâmetros para diferentes formatos.
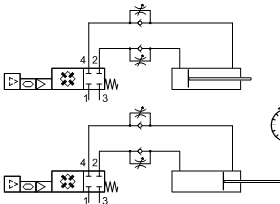
A função básica para o Motion App é a condução com redução precisa do ar de exaustão – um ajuste da redução a mão não é mais necessário. Você simplesmente especifica por meio do Festo Motion Terminal VTEM os tempos de avanço nominais para a extração e retração. Com base nos dados do sensor, o comutador de posição final determina o tempo de avanço real e adapta a redução de ar de exaustão de forma independente e adapta a redução de ar de exaustão até que seja atingido o tempo de avanço determinado. A redução do ar de alimentação está sempre aberta a 100 %. O tempo de avanço real se define a partir do comando de transporte até alcançar o interruptor de posição final. Por meio do monitoramento e adaptação permanentes, um algoritmo de adaptação assegura que o tempo de avança definido sempre seja mantido. Se, após a condução, o algoritmo de adaptação detectar que o tempo especificado não foi mantido, a redução será adaptada. Não existe amortecimento de posição final. Este deve ser assegurada pelo cliente. Os interruptores de posição final do atuador enviam os seus sinais exclusivamente para o módulo de entrada digital da VTEM.
Você precisa de um módulo de entrada digital CTMM no Festo Motion Terminal e dois sensores de posição final digitais no atuador.
- Especificações no Motion App e por meio do controlador programável CLP:
- Tempo de saída
- Tempo de entrada
- Retorno no controlador programável:
- Tempo de deslocamento medido
- Consecução da posição final
- Condução de aprendizado:
A colocação em funcionamento é feita manualmente ou com auxílio da condução de aprendizado. A condução de aprendizado executa o número de cursos necessário até que o tempo de deslocamento nominal desejado esteja na faixa de tolerância. Você inicia a condução de aprendizagem no WebConfig ou por meio do canal de transferência. Se a faixa de tolerância for atingida, o movimento para no status retração. A condução de aprendizado é iniciada pelo usuário pr meio da condução de aprendizado através do aplicativo de condução de aprendizado nº 60.
- Armazenamento persistente de „valores aprendidos“:
Ao desligar, os „valores aprendidos“ serão permanentemente salvos. Assim, na próxima ligação, você não precisa iniciar nenhum processo de aprendizagem. Os parâmetros da aplicação devem ser armazenados separadamente.
Se, depois do desligamento, tiverem se alterados os parâmetros na periferia, pode ser que o primeiro movimento ocorra com valores incorretos. Deste modo, pode surgir um comportamento imprevisível.
Importante: No caso de tempos de paralização mais longos, você deve obrigatoriamente observar isto! No caso de religação, os parâmetros da aplicação e do sistema são testados quanto a alterações. Se houver alterações, o VTEM redefine os „valores aprendidos“ novamente para padrão.
- Função de pré-ventilação:
Se, no início do Motion App, a pressão nas câmaras do cilindro estiver acima da pressão de alimentação a mais de 20%, ambas as câmaras são ventiladas de modo controlado antes do início de um movimento necessário. Deste modo, evita-se que o êmbolo entre em uma posição final totalmente pré-ventilada.
- Faixa de validade:
- Precisão: ± 2 %, mas não mais preciso do que ± 20 ms
- Quantidade máxima permitida de cursos de aprendizado:10
- As informações de precisão ou a quantidade de conduções de aprendizado são válidas para:
- Diâmetro do cilindro ≥ 25 e ≤63,
- com velocidades ≥ 0,15 m/s,
- Comprimentos das mangueiras ≤5 x curso do cilindro
- Curso do cilindro ≥ 50 mm e ≤500 mm
- Massa [kg] ≤0,004 x pressão de alimentação [bar rel] x (diâmetro do cilindro [mm²] )
p.ex., pressão de alimentação 6 bar, diâmetro do cilindro 25 mm ==> massa máxima permitida = 15 kg
- Fora destes limites, a operação do aplicativo também é possível, mas podem surgir restrições na precisão ou na quantidade das conduções de aprendizado necessárias.
- O tempo de deslocamento mínimo possível depende do cilindro operado e das mangueiras.
- Observações:
- Observe a força de impacto máx do cilindro. Você deve assegurar que esta não seja ultrapassada, p.ex., por meio de amortecedores adicionais.
- Para alterações controladas remotamente do tempo de deslocamento ou altearações dos conjuntos de parâmetros, você deve desativar a tarefa de movimento por curto período e ativá-las novamente em seguida.
- Uma pressão de alimentação reduzida pode aumentar a precisão.
- Desviar-se do ciclo convencional, tempos de intervalo resultam em um desvio do tempo de deslocamento.
- Se for usado um cilindro que não se encontra no banco de dados (desconhecido), isto pode resultar em uma quantidade maior dos ciclos de aprendizado.