

Zadany czas ruchu
Please sign in to see prices or request test licenses
Szybkie i łatwe uruchomienie oraz płynne działanie wymaga wyłącznie wprowadzenia czasu ruchu do przodu i do tyłu. Uczenie czasu ruchu opiera się na dostosowaniu funkcji dławienia powietrza na wylocie i pozwala go utrzymać. System automatycznie reguluje wartości, jeżeli warunki pracy ulegną zmianie np. na skutek zużycia części.
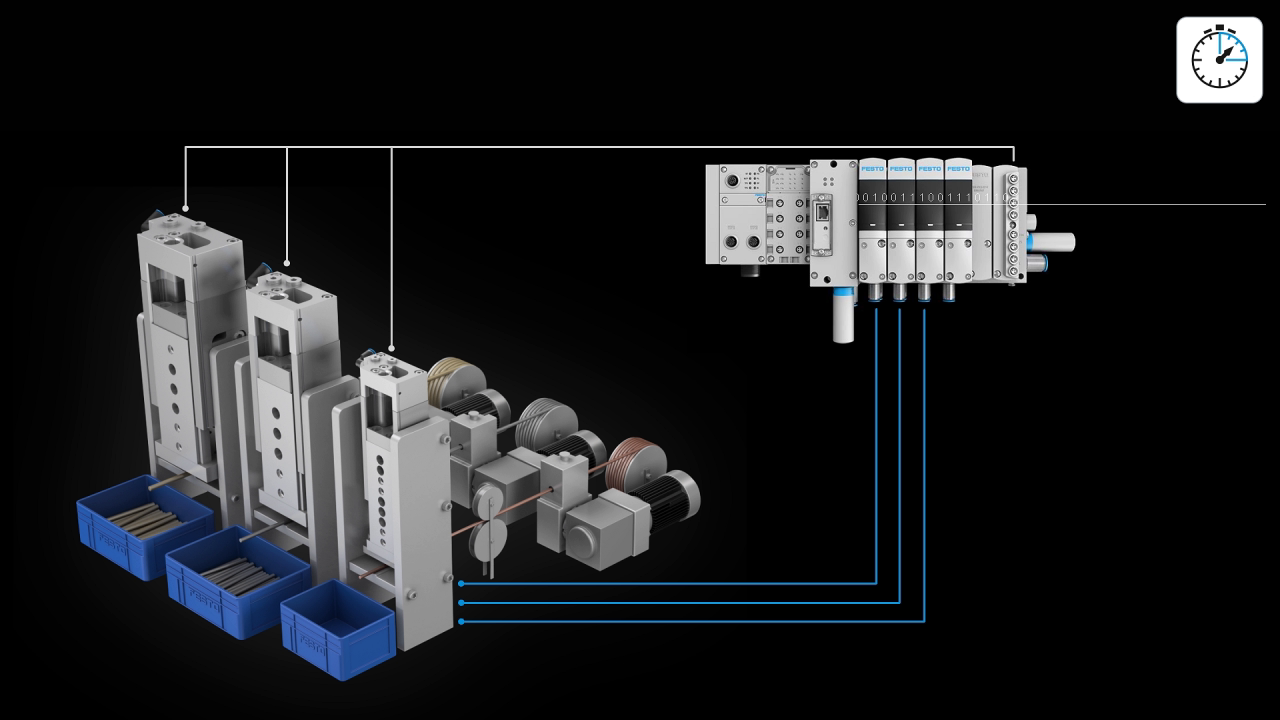
W przypadku aplikacji Motion App „Zadany czas ruchu“ należy podać tylko żądany czas wysuwu i powrotu napędu. Festo Motion Terminal adaptuje się następnie samoczynnie w trakcie cyklu uczenia do istniejących warunków brzegowych. Ciągłe monitorowanie gwarantuje utrzymanie czasów cyklu, kompensując czynniki zakłócające, takie jak tarcie, zmiana ciśnienia zasilania/spiętrzenia, a nawet stopniową zmianę masy. Zmiana czasu cyklu jest bardzo łatwa – za pomocą bezpiecznego z punktu widzenia obsługi modułu zdalnego sterowania – bez potrzeby dokonywania ustawień mechanicznych. Dodatkowo możliwe jest wczytywanie i zapisywanie zestawów parametrów dla różnych formatów.
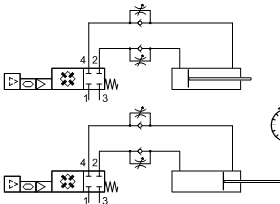
Funkcją podstawową aplikacji Motion App jest realizacja z maksymalną precyzją ruchów poprzez dławienie na wylocie – wyeliminowano ręczne ustawianie dławienia. Za pomocą Festo Motion Terminal VTEM określa się zadane czasy powrotu i wysuwu. W oparciu o dane z czujników krańcowych określany jest samodzielnie rzeczywisty czas ruchu, z dopasowaniem dławienia powietrza wylotowego do momentu osiągnięcia wymaganego czasu ruchu. Brak dławienia na wlocie. Rzeczywisty czas ruchu jest określany na podstawie pomiaru czasu ruchu między czujnikami krańcowymi. Dzięki ciągłemu monitorowaniu algorytm adaptacyjny zapewnia stałe utrzymywanie zadanego czasu ruchu. Jeśli algorytm adaptacyjny po zakończeniu ruchu wykryje, że zadany czas nie został zachowany, następuje dopasowanie dławienia. Nie ma amortyzacji w położeniu końcowym. Musi ona być zapewniona przez klienta. Wyłączniki krańcowe na napędzie przesyłają sygnały wyłącznie do cyfrowych modułów wejściowych terminala VTEM.
Wymagany jest moduł wejść cyfrowych CTMM dla Festo Motion Terminal oraz dwa cyfrowe czujniki położenia końcowego dla napędu.
Ustalanie wartości w Motion App i przez PLC:
- Czas wysuwu
- Czas powrotu
Informacja zwrotna do sterownika:
- Zmierzony czas ruchu
- Osiągnięcie położenia końcowego
Cykl uczenia:
Uruchomienie jest przeprowadzane ręcznie lub za pomocą funkcji uczenia. Cykl uczenia wykonuje taką ilość skoków, jaka jest wymagana dla uzyskania rzeczywistego czasu ruchu w zakresie tolerancji. Proces uczenia można uruchomić przez WebConfig lub kanał komunikacji. Po osiągnięciu zakresu tolerancji cykl zostanie zatrzymany w stanie wycofania. Użytkownik może uruchomić cykl uczenia za pomocą aplikacji uczenia #60.
Ciągłe zapisywanie „nauczonych wartości”:
„Nauczone wartości” są zachowywane po wyłączeniu systemu. Dzięki temu, przy następnym uruchomieniu nie jest wymagany ponowny proces uczenia. Parametry aplikacji muszą zostać zapisanie oddzielnie.
Powodem nieprawidłowych wartości w czasie wykonywania pierwszego ruchu może być zmiana parametrów osprzętu, które uległy zmianie po poprzednim wyłączeniu. Może to prowadzić do nieoczekiwanego działania.
Ważne: Po dłuższych przestojach należy wziąć pod uwagę podane zalecenia! Po ponownym włączeniu należy sprawdzić, czy parametry aplikacji i instalacji nie uległy zmianie. W przypadku zmian VTEM zresetuje „nauczone wartości” do wartości domyślnych.
Funkcja wstępnego napowietrzania (Soft Start):
Jeśli podczas uruchamiania aplikacji Motion App wartość ciśnienia w komorach siłowników jest o ponad 20% niższa od wartości ciśnienia zasilania, to przed wykonaniem żądanego ruchu ciśnienie w obu komorach zostanie w kontrolowany sposób zwiększone. Zapobiega to cofaniu tłoka do położenia końcowego przy całkowitym odpowietrzeniu.
Parametry:
- Dokładność: ± 2%, ale nie większa niż ± 20 ms
- Maksymalna dopuszczalna liczba skoków ruchu uczenia: 10
- Dotyczy dokładności lub liczby ruchów uczenia:
- Średnica siłownika ≥ 25 i ≤63,
- przy prędkościach ≥ 0,15 m/s,
- długości przewodu ≤5 x skok siłownika
- skok siłownika ≥ 50 mm i ≤ 500 mm
- masa [kg] ≤0,004 x ciśnienie zasilania [bar rel] x (średnica siłownika [mm²])
np. ciśnienie zasilania 6 bar, średnica siłownika 25 mm ==> maksymalna dopuszczalna masa = 15 kg
- Aplikacja może być również obsługiwana w przypadku wartości poza podanymi limitami; jednak może to mieć wpływ na ograniczenie dokładności i ilości wymaganych ruchów uczenia.
- Minimalny możliwy czas ruchu zależy od siłownika i połączeń przewodów.
Uwagi:
- Należy wziąć pod uwagę na maksymalną energię uderzenia siłownika. Należy upewnić się, że nie zostanie przekroczona przez zastosowanie np. dodatkowego tłumienia uderzeń.
- Aby zmienić czas ruchu za pomocą zdalnego sterowania lub zmiany zestawu parametrów, należy dezaktywować zadanie ruchu, a następnie ponownie je aktywować.
- Zwiększenie dokładności można uzyskać, w razie potrzeby, przez zmniejszenie ciśnienia zasilania.
- Przerwy odbiegające od normalnego cyklu powodują odchyłki czasu ruchu.
- W przypadku zastosowania nieznanego typu siłownika, który nie jest dostępny w bazie danych, może być wymagana większa liczba cykli uczenia.
Ważne: Do korzystania z aplikacji wymagane są wyłączniki położenia końcowego siłownika i moduł wejść cyfrowych CTMM dla Festo Motion Terminal.